Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 609 questões
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Elétrica |
Q573197
Engenharia Eletrônica
Analise o diagrama de blocos a seguir, no qual G1, G2, G3, H1 e H2 são funções transferência.
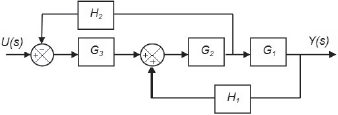
Considerando a entrada (U(s)) e a saída (Y(s)), a função transferência resultante equivalente a estrutura dos blocos da figura é:
Considerando a entrada (U(s)) e a saída (Y(s)), a função transferência resultante equivalente a estrutura dos blocos da figura é:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Elétrica |
Q573192
Engenharia Eletrônica
Um sistema, cuja função de transferência é representada pela função (s2 + 5s + 6)/(s3 +15s2 +50s) possui:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Mecânica |
Q569173
Engenharia Eletrônica
A respeito dos controladores PID, pode-se dizer que:
I. Usualmente, as perturbações no carregamento são de baixa frequência, já os sensores de ponta são de alta frequência.
II. O controle PID geralmente traz bons resultados se a planta dinâmica dominante é de segunda ordem.
III. A antecipação da ação derivativa reage à taxa rápida de variação do erro.
Assinale:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569039
Engenharia Eletrônica
Texto associado
Uma planta industrial é composta por dois equipamentos que possuem modelos lineares ideais G1(s) e G2(s).
A montagem é feita de forma que a saída de G1(s) é a entrada de G2(s), conforme ilustra a figura.

Para as funções de transferências definidas por afirma-se:
afirma-se:
I. Para uma entrada R(s) limitada, a saída Y(s) também é limitada (BIBO estabilidade)
PORQUE
II. O produto de G1(s) por G2(s) resulta em uma função de transferência estável.
A montagem é feita de forma que a saída de G1(s) é a entrada de G2(s), conforme ilustra a figura.
Para as funções de transferências definidas por
afirma-se:I. Para uma entrada R(s) limitada, a saída Y(s) também é limitada (BIBO estabilidade)
PORQUE
II. O produto de G1(s) por G2(s) resulta em uma função de transferência estável.
Assinale:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569031
Engenharia Eletrônica
As funções de transferência podem ser estudadas em diversos aspectos na teoria de controle clássica. Uma análise fundamental a ser executada é a estabilidade, a qual pode ser feita com alguma das técnicas disponíveis na literatura sobre controle como, por exemplo, o critério de estabilidade de Routh.
Sobre a estabilidade das funções de transferência e
e 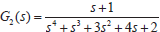 é correto afirmar que:
é correto afirmar que:
Sobre a estabilidade das funções de transferência
e é correto afirmar que:
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista em Metrologia e Qualidade - Informática Aplicada à Metrologia Legal |
Q449578
Engenharia Eletrônica
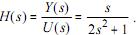
Em muitas representações de sistemas contínuos no tempo, com uma única entrada e uma única saída, utiliza-se representações a partir da variável complexa s no domínio da transformada de Laplace. A partir dessa representação, é de fundamental importância definir a função de transferência para o sistema em análise. Uma das principais informações que podem ser extraídas da análise da função de transferência é a resposta em regime permanente do sistema, pois assim é possível verificar o comportamento do sistema depois de passado o período transitório. Nesse contexto, considere o sistema cuja função de transferência — H(s) — é dada por 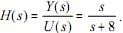
A resposta em regime permanente desse sistema, quando a entrada for um degrau unitário, será igual a
A resposta em regime permanente desse sistema, quando a entrada for um degrau unitário, será igual a
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista em Metrologia e Qualidade - Informática Aplicada à Metrologia Legal |
Q449576
Engenharia Eletrônica
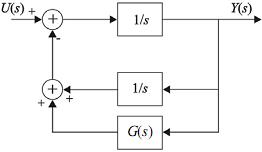
O estudo de sistemas de controle em malha-fechada envolve, geralmente, o uso de álgebra de diagrama de blocos, que permite avaliar um sistema de forma simples, contemplando os aspectos globais da resposta do sistema. A figura acima mostra o diagrama de blocos da planta de um sistema de controle em malha-fechada, representado no domínio da variável complexa da transformada de Laplace. Aplicando-se as operações de simplificação de diagrama de blocos, obteve-se que a função de transferência desse sistema é dada por
 .
. Com base nessas informações, é correto concluir que a função de transferência
 é dada por
é dada por
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista em Metrologia e Qualidade - Informática Aplicada à Metrologia Legal |
Q449572
Engenharia Eletrônica
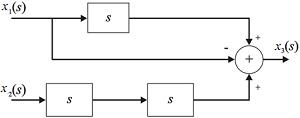
O diagrama de blocos acima representa, no domínio da variável complexa s da transformada de Laplace, um sistema de controle com duas entradas,
 e
e  , e uma saída,
, e uma saída,  .
. Considerando que as condições iniciais para as variáveis
 ,
,  e
e  são nulas para t = 0 , a equação no domínio do tempo que descreve esse sistema, para t > 0, é
são nulas para t = 0 , a equação no domínio do tempo que descreve esse sistema, para t > 0, é
Ano: 2010
Banca:
CESGRANRIO
Órgão:
PETROQUÍMICA SUAPE
Prova:
CESGRANRIO - 2010 - PETROQUÍMICA SUAPE - Técnico de Instrumentação Júnior |
Q185183
Engenharia Eletrônica
Os sistemas de controle são classificados em dois tipos: sistemas de controle em malha aberta e sistemas de controle em malha fechada. A distinção entre eles é que, na malha
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
ABIN
Prova:
CESPE - 2010 - ABIN - Oficial Técnico de Inteligência – Área de Engenharia Elétrica |
Q184705
Engenharia Eletrônica
Texto associado
Estima-se, atualmente, que mais de 90% das malhas de controle
utilizadas em processos industriais operem com controladores
proporcional-integral-derivativo (PID). Acerca de controlador PID,
julgue os itens a seguir.
utilizadas em processos industriais operem com controladores
proporcional-integral-derivativo (PID). Acerca de controlador PID,
julgue os itens a seguir.
A função de transferência de um controlador PID pode ser representada por H (s) = K 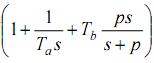 , em que K é o ganho do controlador,
, em que K é o ganho do controlador,  são as constantes de tempo integral e derivativo, respectivamente, e p é um polo para limitação de ganho em altas frequências.
são as constantes de tempo integral e derivativo, respectivamente, e p é um polo para limitação de ganho em altas frequências.
, em que K é o ganho do controlador, são as constantes de tempo integral e derivativo, respectivamente, e p é um polo para limitação de ganho em altas frequências.
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
ABIN
Prova:
CESPE - 2010 - ABIN - Oficial Técnico de Inteligência – Área de Engenharia Elétrica |
Q184704
Engenharia Eletrônica
Texto associado
Estima-se, atualmente, que mais de 90% das malhas de controle
utilizadas em processos industriais operem com controladores
proporcional-integral-derivativo (PID). Acerca de controlador PID,
julgue os itens a seguir.
utilizadas em processos industriais operem com controladores
proporcional-integral-derivativo (PID). Acerca de controlador PID,
julgue os itens a seguir.
O uso de controlador PID é adequado para eliminar erros de regime permanente (ação derivativa), antecipar o comportamento do processo (ação integral) e reagir ao erro presente, conferindo ao sistema de controle uma reação rápida à ação de perturbações ou variações de referência de magnitudes significativas (ação proporcional).
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
ABIN
Prova:
CESPE - 2010 - ABIN - Oficial Técnico de Inteligência – Área de Engenharia Elétrica |
Q184703
Engenharia Eletrônica
Texto associado
Estima-se, atualmente, que mais de 90% das malhas de controle
utilizadas em processos industriais operem com controladores
proporcional-integral-derivativo (PID). Acerca de controlador PID,
julgue os itens a seguir.
utilizadas em processos industriais operem com controladores
proporcional-integral-derivativo (PID). Acerca de controlador PID,
julgue os itens a seguir.
Uma possível implementação de um controlador PID pode ser corretamente realizada pelo circuito mostrado na figura abaixo, utilizando-se amplificadores operacionais, resistores, potenciômetros e capacitores. O ganho, a constante de tempo integral, a constante de tempo derivativo e o polo para eliminação de ganho em altas frequências são ajustados como  , respectivamente.
, respectivamente.
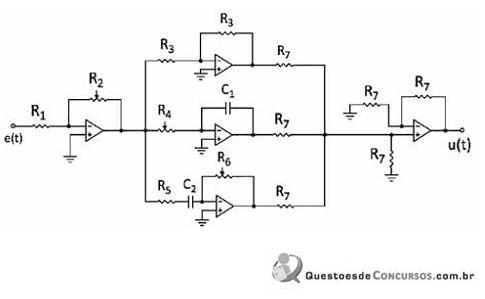
, respectivamente.
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
ABIN
Prova:
CESPE - 2010 - ABIN - Oficial Técnico de Inteligência – Área de Engenharia Elétrica |
Q184702
Engenharia Eletrônica
Texto associado

O diagrama de bloco mostrado na figura acima ilustra a entrada
X(s) e a saída Y(s) de um sistema dinâmico, cuja função de
transferência é H(s). Considere que, à entrada do sistema, seja
aplicado um impulso unitário X(s) = 1, sendo então observada a
resposta Y(s) resultante. Considere, ainda, que a transformada de
Laplace Y(s) do sinal observado nos terminais de saída possua zeros

= –5, e que Y(s) represente uma tensão e Y(2) = 0,5 V.
Com base nessas considerações, julgue os seguintes itens.
O diagrama de bloco mostrado na figura acima ilustra a entrada
X(s) e a saída Y(s) de um sistema dinâmico, cuja função de
transferência é H(s). Considere que, à entrada do sistema, seja
aplicado um impulso unitário X(s) = 1, sendo então observada a
resposta Y(s) resultante. Considere, ainda, que a transformada de
Laplace Y(s) do sinal observado nos terminais de saída possua zeros
= –5, e que Y(s) represente uma tensão e Y(2) = 0,5 V.
Com base nessas considerações, julgue os seguintes itens.
Em regime permanente, a amplitude do sinal de saída é dada por y(t → ∞ ) =  V.
V.
V.
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
ABIN
Prova:
CESPE - 2010 - ABIN - Oficial Técnico de Inteligência – Área de Engenharia Elétrica |
Q184701
Engenharia Eletrônica
Texto associado
O diagrama de bloco mostrado na figura acima ilustra a entrada
X(s) e a saída Y(s) de um sistema dinâmico, cuja função de
transferência é H(s). Considere que, à entrada do sistema, seja
aplicado um impulso unitário X(s) = 1, sendo então observada a
resposta Y(s) resultante. Considere, ainda, que a transformada de
Laplace Y(s) do sinal observado nos terminais de saída possua zeros
= –5, e que Y(s) represente uma tensão e Y(2) = 0,5 V.
Com base nessas considerações, julgue os seguintes itens.
O diagrama de bloco mostrado na figura acima ilustra a entrada
X(s) e a saída Y(s) de um sistema dinâmico, cuja função de
transferência é H(s). Considere que, à entrada do sistema, seja
aplicado um impulso unitário X(s) = 1, sendo então observada a
resposta Y(s) resultante. Considere, ainda, que a transformada de
Laplace Y(s) do sinal observado nos terminais de saída possua zeros
= –5, e que Y(s) represente uma tensão e Y(2) = 0,5 V.
Com base nessas considerações, julgue os seguintes itens.
A função de transferência do sistema é determinada pela relação H (s) =  , em que s é a frequência complexa.
, em que s é a frequência complexa.
, em que s é a frequência complexa.
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
ABIN
Prova:
CESPE - 2010 - ABIN - Oficial Técnico de Inteligência – Área de Engenharia Elétrica |
Q184700
Engenharia Eletrônica
Texto associado
O diagrama de bloco mostrado na figura acima ilustra a entrada
X(s) e a saída Y(s) de um sistema dinâmico, cuja função de
transferência é H(s). Considere que, à entrada do sistema, seja
aplicado um impulso unitário X(s) = 1, sendo então observada a
resposta Y(s) resultante. Considere, ainda, que a transformada de
Laplace Y(s) do sinal observado nos terminais de saída possua zeros
= –5, e que Y(s) represente uma tensão e Y(2) = 0,5 V.
Com base nessas considerações, julgue os seguintes itens.
O diagrama de bloco mostrado na figura acima ilustra a entrada
X(s) e a saída Y(s) de um sistema dinâmico, cuja função de
transferência é H(s). Considere que, à entrada do sistema, seja
aplicado um impulso unitário X(s) = 1, sendo então observada a
resposta Y(s) resultante. Considere, ainda, que a transformada de
Laplace Y(s) do sinal observado nos terminais de saída possua zeros
= –5, e que Y(s) represente uma tensão e Y(2) = 0,5 V.
Com base nessas considerações, julgue os seguintes itens.
O sinal de saída é limitado para operação que requeira sinal de entrada em corrente contínua.
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador - Engenharia Eletrônica |
Q112748
Engenharia Eletrônica

Na situação acima, para que o sistema em malha fechada seja estável e sobreamortecido, o valor de k1 deve ser
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador - Engenharia Eletrônica |
Q112745
Engenharia Eletrônica
Um sistema dinâmico linear, causal e invariante no tempo, é modelado pela função de transferência G (s) =  , no SI. Deseja-se implementar um controlador proporcional para esse sistema, segundo o diagrama de blocos mostrado abaixo, em que X(s) e Y(s) representam a transformada de Laplace da entrada e da saída do sistema em malha fechada, respectivamente, e kp é o ganho
, no SI. Deseja-se implementar um controlador proporcional para esse sistema, segundo o diagrama de blocos mostrado abaixo, em que X(s) e Y(s) representam a transformada de Laplace da entrada e da saída do sistema em malha fechada, respectivamente, e kp é o ganho
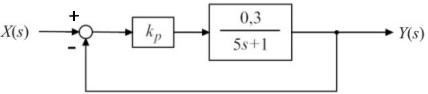
Considerando essas informações, assinale a opção que apresenta o valor do ganho kp de forma que a constante de tempo em malha fechada, no diagrama mostrado, seja de meio segundo.
, no SI. Deseja-se implementar um controlador proporcional para esse sistema, segundo o diagrama de blocos mostrado abaixo, em que X(s) e Y(s) representam a transformada de Laplace da entrada e da saída do sistema em malha fechada, respectivamente, e kp é o ganhoConsiderando essas informações, assinale a opção que apresenta o valor do ganho kp de forma que a constante de tempo em malha fechada, no diagrama mostrado, seja de meio segundo.
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador - Engenharia Eletrônica |
Q112711
Engenharia Eletrônica

Considerando o circuito acima, caso os sinais ei(t) e e0(t) sejam representados, no domínio da transformada de Laplace, por Et(s) e E0(s) respectivamente, então a expressão H(s) =  é igual a
é igual a
é igual a
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
TRT - 21ª Região (RN)
Prova:
CESPE - 2010 - TRT - 21ª Região (RN) - Analista Judiciário - Engenharia Elétrica |
Q110264
Engenharia Eletrônica
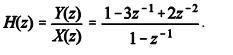
Julgue o próximo item, referente ao filtro digital definido pela relação
y(n) = y(n - 1) - y(n - 2) + x(n) - 3x(n -1) + 2x (n - 2).
A função de transferência  no domínio da transformada Z, é dada por
no domínio da transformada Z, é dada por
Ano: 2010
Banca:
FCC
Órgão:
TRT - 8ª Região (PA e AP)
Prova:
FCC - 2010 - TRT - 8ª Região (PA e AP) - Analista Judiciário - Engenharia Elétrica |
Q82768
Engenharia Eletrônica
Um sistema de primeira ordem tem como resposta à entrada degrau a expressão:
A transformada de Laplace dessa resposta é:
A transformada de Laplace dessa resposta é: