Questões de Concurso Para if-rs
Foram encontradas 2.336 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541196
Engenharia de Automação
Texto associado
Em relação à programação de robôs, assinale a única alternativa que apresenta uma correspondência correta de itens numerados em romano com itens em ordem alfabética:
I. Pode ser feita online.
II. É baseada em linguagens textuais.
III. Reduz o tempo de parada de produção.
IV. Pode conter lógicas complexas.
V. Utilizável apenas para operações de repetição de pontos.
A. Programação por demonstração/repetição.
B. Programação por linguagens de robôs.
C. Programação por linguagens de tarefas.
Conforme acima citado, segue abaixo.
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541195
Engenharia de Automação
Em relação às afirmativas sobre o controle Proporcional-Derivativo (PD) com compensação da gravidade:
I. Sua estabilidade global em relação a uma postura de equilíbrio é provada através do método de Lyapunov.
II. A técnica pode ser empregada para controle tanto no espaço das juntas quanto no espaço operacional.
III. Ela é uma técnica de controle centralizado, que considera o manipulador como um sistema de múltiplas entradas e múltiplas saídas, dinamicamente acoplado.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
I. Sua estabilidade global em relação a uma postura de equilíbrio é provada através do método de Lyapunov.
II. A técnica pode ser empregada para controle tanto no espaço das juntas quanto no espaço operacional.
III. Ela é uma técnica de controle centralizado, que considera o manipulador como um sistema de múltiplas entradas e múltiplas saídas, dinamicamente acoplado.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541194
Engenharia de Automação
Texto associado
Em relação às afirmativas abaixo, marque a alternativa correta:
I. Um robô com mais de seis graus de liberdade é intrinsecamente redundante, no que tange ao posicionamento com destreza do efetuador final no espaço 3D.
II. Robôs de cadeia fechada e paralelos são inerentemente redundantes.
III. Os manipuladores cinematicamente redundantes permitem infinitas soluções dasua cinemática inversa para uma postura particular do efetuador final.
IV. A redundância é um conceito relativo à tarefa definida para o manipulador final, ou seja, o mesmo manipulador pode ser redundante para determinada tarefa e não redundante para outra.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541193
Engenharia de Automação
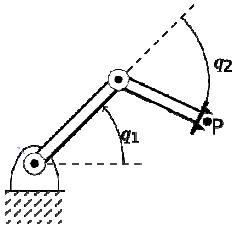
Seja o manipulador planar da figura abaixo, com duas juntas rotacionais, cujas posições são definidas pelas variáveis q1 e q2. O efetuador final está montado no elo 2, e sua posição é definida pelo ponto P. Em relação à cinemática desse manipulador, é INCORRETO afirmar:
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541192
Engenharia de Automação
Em relação às afirmativas abaixo sobre a definição de graus de liberdade de um manipulador.
I. Número de variáveis independentes necessárias para especificar completamente a configuração de uma cadeia cinemática em relação a uma referência.
II. Dimensão do espaço de configuração de um manipulador.
III. Número de juntas de um manipulador, serial ou paralelo.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
I. Número de variáveis independentes necessárias para especificar completamente a configuração de uma cadeia cinemática em relação a uma referência.
II. Dimensão do espaço de configuração de um manipulador.
III. Número de juntas de um manipulador, serial ou paralelo.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):