Questões Militares
Sobre álgebra linear - equações lineares, espaço vetorial e transformações lineares e matrizes em matemática
Foram encontradas 104 questões
0s autovalores da matriz M =  são iguais a
são iguais a
A dimensão do espaço linha da matriz M =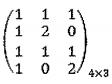 é igual a
é igual a
A imagem da transformação linear T(x,y,z) = (x,y,z)X (1,1,1), em que X indica o produto vetorial em R3, é:
X 2 3 5 6 9 11
y 4 6 8 7 6 5
Considere a equação de regressão Y = aX+b e os somatórios Σx.Y e Σx2 iguais a 217 e 276, respectivamente. Os parâmetros a e b da equação de regressão apresentada acima são, respectivamente:
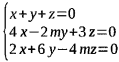
Para o maior valor inteiro de m que torna o sistema acima possível e indeterminado, pode-se afirmar que a expressão
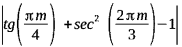 vale
vale com base B= {V1 = {0 , 1 , 0) ,v2 = (1,0,1) , v3 = (1,1,0)} e ∈
com base B= {V1 = {0 , 1 , 0) ,v2 = (1,0,1) , v3 = (1,1,0)} e ∈  e sabendo-se que f(v1) = (1,2), f(v2) = (3,1) e f(v3) = (0,2), determine f(5,3,-2) e assinale a
opção correta.
e sabendo-se que f(v1) = (1,2), f(v2) = (3,1) e f(v3) = (0,2), determine f(5,3,-2) e assinale a
opção correta.
Determine os autovalores da matriz  e, a seguir, assinale a opção correta.
e, a seguir, assinale a opção correta.
 é a matriz inversa de
é a matriz inversa de  ,então xY é igual a:
,então xY é igual a:
Com base nas séries acima, assinale a opção que apresenta apenas a(s) convergente(s).
Analise o sistema abaixo.
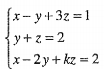
Calcule o valor de k para que o sistema acima seja possível
e indeterminado, e assinale a opção correta.
Considere a matriz abaixo.
Sendo Y sua matriz oposta e W sua matriz inversa, qual
opção representa o resultado da soma Y + W?
Seja  um vetor ortogonal aos vetores
um vetor ortogonal aos vetores  e
e  . Se o produto escalar de
. Se o produto escalar de  pelo vetor
pelo vetor  é igual a -1, podemos afirmar que a soma das componentes de
é igual a -1, podemos afirmar que a soma das componentes de  é
é
Seja o operador linear T definido a seguir.
T: R2→ R2
(x ;y ) → (x + y ; 4x + y)
O operador T possui autovalores λ1e λ2. Assinale a opção que representa λ1λ2 - (λ2)2
I. Se uma transformação linear A: E→F é injetora então dim E ≤ dim F.
II. Dada uma transformação linear A: E→F, para todo b em F fixado o conjunto G = {x ∈ E;Ax = b} é um espaço vetorial.
III. Se A: E→F é uma transformação linear bijetora então dim E = dim F.
IV. Se dim E=5 e dim F=3 então o núcleo da transformação linearA: E→F