Questões de Engenharia de Automação - Análise e Controle de Sistemas para Concurso
Foram encontradas 71 questões
Ano: 2014
Banca:
FCC
Órgão:
SABESP
Prova:
FCC - 2014 - SABESP - Controlador de Sistemas de Saneamento |
Q789495
Engenharia de Automação
O diagrama abaixo representa um sistema de controle automatizado em malha fechada.
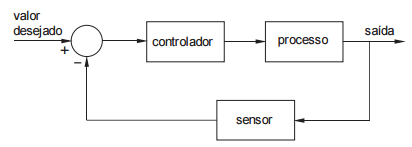
Nesse sistema,
Nesse sistema,
Ano: 2014
Banca:
FCC
Órgão:
SABESP
Prova:
FCC - 2014 - SABESP - Controlador de Sistemas de Saneamento |
Q789489
Engenharia de Automação
Para o controle de deslocamentos e posições de robôs são acoplados aos seus eixos discos divididos alternadamente em
setores opacos e transparentes que, ao girar, permitem a passagem intermitente de luz. Esse tipo de dispositivo é denominado
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541195
Engenharia de Automação
Em relação às afirmativas sobre o controle Proporcional-Derivativo (PD) com compensação da gravidade:
I. Sua estabilidade global em relação a uma postura de equilíbrio é provada através do método de Lyapunov.
II. A técnica pode ser empregada para controle tanto no espaço das juntas quanto no espaço operacional.
III. Ela é uma técnica de controle centralizado, que considera o manipulador como um sistema de múltiplas entradas e múltiplas saídas, dinamicamente acoplado.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
I. Sua estabilidade global em relação a uma postura de equilíbrio é provada através do método de Lyapunov.
II. A técnica pode ser empregada para controle tanto no espaço das juntas quanto no espaço operacional.
III. Ela é uma técnica de controle centralizado, que considera o manipulador como um sistema de múltiplas entradas e múltiplas saídas, dinamicamente acoplado.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
Ano: 2014
Banca:
CETRO
Órgão:
AEB
Prova:
CETRO - 2014 - AEB - Tecnologista Júnior - Desenvolvimento Tecnológico |
Q483870
Engenharia de Automação
Quando se utiliza um controlador proporcional, integrativo e derivativo PID (Proporcional Integrativo Derivativo), cada parcela deve ser ajustada aumentando ou diminuindo seu fator de ganho. Imagine um veículo que deve seguir um curso estável. Ele apresenta um deslocamento em relação à posição desejada, mantendo um erro estacionário. Assinale a alternativa que apresenta a alteração que deve ser realizada no PID para reduzir esse tipo de erro.
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista - Metrologia em Informática |
Q267626
Engenharia de Automação
Um sistema linear cuja função de transferência seja dada por 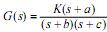 , em que K, a, b e c são números reais, será estável se
, em que K, a, b e c são números reais, será estável se
, em que K, a, b e c são números reais, será estável se