Questões de Concurso
Sobre álgebra linear - equações lineares, espaço vetorial e transformações lineares e matrizes em matemática
Foram encontradas 537 questões
Q362089
Matemática
Seja a transformação linear T :  definida por T(x) = Ax , em que x é um vetor de
definida por T(x) = Ax , em que x é um vetor de 
Se A =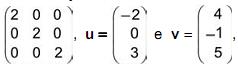 então a imagem de u + v por T é:
então a imagem de u + v por T é:
definida por T(x) = Ax , em que x é um vetor de Se A =
então a imagem de u + v por T é:
Q362086
Matemática
No espaço vetorial  a matriz da mudança de base de A =
a matriz da mudança de base de A =  é:
é:
a matriz da mudança de base de A = é:
Q362085
Matemática
Dados os vetores u = 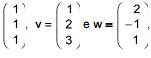 , do espaço vetorial
, do espaço vetorial  é verdade que
é verdade que
, do espaço vetorial é verdade que
Q362084
Matemática
No espaço vetorial  considere os vetores u =
considere os vetores u = 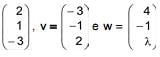 , em que ? ?
, em que ? ?  Para que w pertença ao plano gerado por u e v, o número ? deve ser
Para que w pertença ao plano gerado por u e v, o número ? deve ser
considere os vetores u = , em que ? ? Para que w pertença ao plano gerado por u e v, o número ? deve ser
Ano: 2010
Banca:
CESGRANRIO
Órgão:
IBGE
Prova:
CESGRANRIO - 2010 - IBGE - Tecnologista em Informações Geográficas - Estatística |
Q335419
Matemática
Considere a transformação linear
A: IR3 ->IR4 de forma que v = (2, -1,1) esteja no núcleo e que B = {(1, 2, -1, 0), (3, 0, 1, 2)} seja uma base de sua imagem. Então, A (3, 2,1) é igual a
Ano: 2010
Banca:
CESGRANRIO
Órgão:
IBGE
Prova:
CESGRANRIO - 2010 - IBGE - Tecnologista em Informações Geográficas - Estatística |
Q335418
Matemática
Considere o operador A no IR2 definido por A(x,y) = (x + 2 y, 3 x + 2 y). Um dos seus autovetores é
Ano: 2010
Banca:
CESGRANRIO
Órgão:
IBGE
Prova:
CESGRANRIO - 2010 - IBGE - Tecnologista em Informações Geográficas - Estatística |
Q335417
Matemática
São dados os vetores v
1 = (1, 2, -3), v2 (2, -1, 4) e v3 = (7, 4, k). Se o conjunto { v1, v2, v3 } é linearmente dependente, o valor de k é
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Engenheiro de Petróleo Júnior |
Q189665
Matemática
O vetor (m, 2, 3) do R3 é uma combinação linear dos vetores (1, 0, 1) e (2, 1, 1). O valor de m é
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Engenheiro de Petróleo Júnior |
Q189664
Matemática
A imagem de uma transformação linear T: R6 → R3 é o espaço gerado pelos vetores (1, 0, 1), (0, 1, 0) e (1, –1, 1). A dimensão do núcleo de T é
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Engenheiro de Petróleo Júnior |
Q189655
Matemática
A transformação linear T: R3 → R3 associa a cada vetor u de R3 o produto vetorial a × u, onde a = (1, 0, 1). A matrizde T, com respeito à base canônica de R3, é
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Engenheiro de Petróleo Júnior |
Q189637
Matemática
Uma matriz quadrada A, de ordem 2, é tal que a soma dos elementos de cada linha e de cada coluna é igual a 3. Considere as afirmativas abaixo.
I - (1, 1) é necessariamente um autovetor de A.
II - 3 é necessariamente um autovalor de A.
III - (1, 0) é necessariamente um autovetor de A.
Está correto o que se afirma em
I - (1, 1) é necessariamente um autovetor de A.
II - 3 é necessariamente um autovalor de A.
III - (1, 0) é necessariamente um autovetor de A.
Está correto o que se afirma em
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Engenheiro de Petróleo Júnior |
Q189613
Matemática
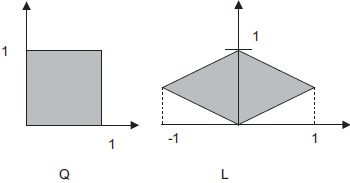
A imagem do quadrado Q, representado acima na figura à esquerda, por uma transformação linear T: R2 → R2 é o losango L representado na figura à direita. Dentre as matrizes abaixo, aquela que pode representar T com respeito àbase canônica de R2 é
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Geofísico Júnior - Física |
Q188736
Matemática
Para o sistema de equações lineares AX = B, possível e determinado, fatora-se a matriz A usando a equação PA = LU, onde L e U são matrizes triangulares inferior e superior, respectivamente, e P uma matriz de permutação. Fazendo essa fatoração, a solução em X deste sistema pode ser escrita na forma
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Geofísico Júnior - Física |
Q188716
Matemática
Dada a transformação linear  então ker T é dado por
então ker T é dado por
então ker T é dado por
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Geofísico Júnior - Física |
Q188694
Matemática
Dado um operador linear TA: R2 → R2 , tal que  , então seus autovetores são
, então seus autovetores são
, então seus autovetores são
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Provas:
CESGRANRIO - 2010 - Petrobras - Analista de Pesquisa Operacional Júnior
|
CESGRANRIO - 2010 - Petrobras - Engenheiro de Petróleo Júnior |
Q187711
Matemática
Seja S o subespaço vetorial de R3 formado por todos os ternos (x, y, z) que são soluções do sistema linear

Considere as seguintes afirmativas relativas a S:
I - S é o espaço gerado pelos vetores (2, 1, 3) e (1, –1, 2);
II - todos os vetores em S são ortogonais ao vetor (2, 1, 3);
III - S tem dimensão 0.
Está correto APENAS o que se afirma em
Considere as seguintes afirmativas relativas a S:
I - S é o espaço gerado pelos vetores (2, 1, 3) e (1, –1, 2);
II - todos os vetores em S são ortogonais ao vetor (2, 1, 3);
III - S tem dimensão 0.
Está correto APENAS o que se afirma em
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Analista de Pesquisa Operacional Júnior |
Q187710
Matemática
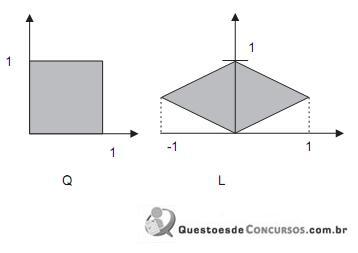
A imagem do quadrado Q, representado acima na figura à esquerda, por uma transformação linear T: R2→ R2 é o losango L representado na figura à direita. Dentre as matrizes abaixo, aquela que pode representar T com respeito à base canônica de R2 é
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Engenheiro de Equipamento Júnior - Mecânica - Biocombustível |
Q187538
Matemática
Se v = ω x R, onde os vetores ω e R são perpendiculares entre si, o vetor resultante da operação ω x ( ω x R) é
Ano: 2010
Banca:
CESGRANRIO
Órgão:
PETROQUÍMICA SUAPE
Prova:
CESGRANRIO - 2010 - PETROQUÍMICA SUAPE - Engenheiro de Equipamento Pleno - Eletricidade |
Q185134
Matemática
Analise as seguintes propriedades da Transformada de Laplace:
1) Aplicada sobre uma função exponencial: L [ ke-at ] = k /s+a
2) Aplicada sobre a convolução de duas funções temporais, é igual ao produto das correspondentes transformadas dessas funções, no domínio de Laplace, ou seja,
L [ f1 (t)*f2 (t) ] = F1 (s)F2 (s)
Considerando dois sinais no domínio do tempo, apenas para t > 0, dados pelas funções x(t) = e-3t e y(t) = 2e-2t e sendo w(t) = x(t) *y (t) , a expressão de w(t), para t > 0, é
1) Aplicada sobre uma função exponencial: L [ ke-at ] = k /s+a
2) Aplicada sobre a convolução de duas funções temporais, é igual ao produto das correspondentes transformadas dessas funções, no domínio de Laplace, ou seja,
L [ f1 (t)*f2 (t) ] = F1 (s)F2 (s)
Considerando dois sinais no domínio do tempo, apenas para t > 0, dados pelas funções x(t) = e-3t e y(t) = 2e-2t e sendo w(t) = x(t) *y (t) , a expressão de w(t), para t > 0, é
Ano: 2010
Banca:
CESGRANRIO
Órgão:
PETROQUÍMICA SUAPE
Prova:
CESGRANRIO - 2010 - PETROQUÍMICA SUAPE - Engenheiro de Equipamento Pleno - Eletricidade |
Q185109
Matemática
A matriz da transformação linear

A imagem de T é
A imagem de T é